
助力中国质造 赋能极致研发
BOOST THE CHINESE QUALIFACTURING EMPOWER THE ULTIMATE EXPERIENCE DEVELOPEMENT
BOOST THE CHINESE QUALIFACTURING EMPOWER THE ULTIMATE EXPERIENCE DEVELOPEMENT
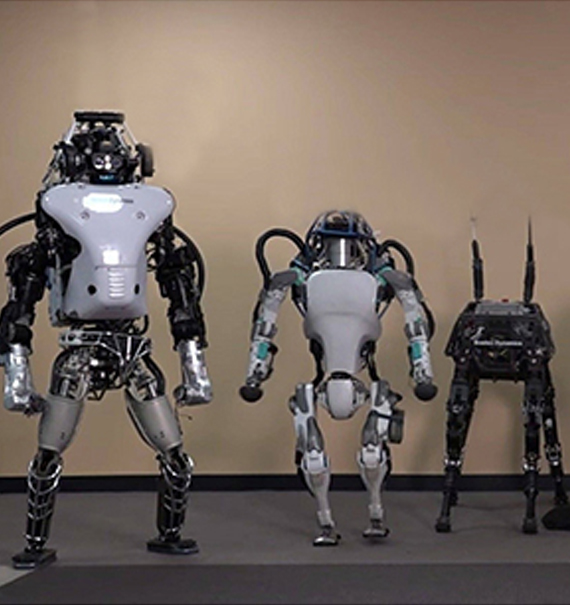
1、仿生机器人工程师在设计新型机器人时面临的关键挑战之一就是选择腿中使用的轴承和横梁。这点非常重要,因为轴承和横梁的刚度决定着臀部和膝盖上所能承受的力值。
2、链接灵活性问题需要高水平的数学技能,并且需要大量时间。 随着机器人的自由度和几何复杂度的增加,分析方法的复杂度呈指数级增长。
采用多体动力学仿真软件,将每个机器人腿部约450个零件合并为几个刚体,每个刚体模拟结构中对应的运动部分。
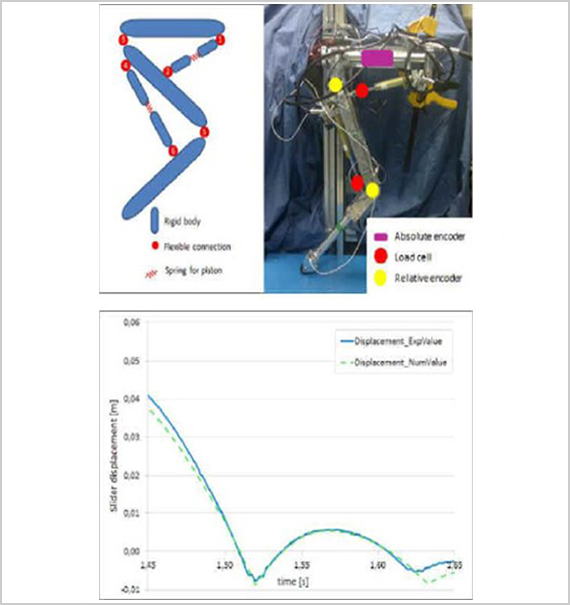
1、与传统手工计算相比,可节省80%的时间。
2、能获得与实测一致的膝盖力、臀部力以及滑块位移等结果。
3、机器人腿部的精确建模使工程师能够研究整个机器人在诸如步行或在不同类型的地上奔跑等任务中的性能。
